
可解释性差异
基于规则的系统与端到端系统在可解释性方面存在显著不同。普遍观点认为,基于规则的系统具有很高的可解释性,这主要是因为它遵循着清晰的规则逻辑,就像按步骤进行,每一步都能说得明明白白。end-to-end系统缺乏可解释性,内部运作宛如一个“黑匣子”,其结果的产生难以进行明确说明。
不同的解释性特质决定了它们在不同情境下的使用效果。解释性较强的基于规则的系统适合于那些对决策过程有明确要求的场合。相对而言,端到端系统虽然难以解释,但在那些更看重最终结果、对中间步骤要求不高的场合,却具有其独特的优势。
端到端自动驾驶尝试
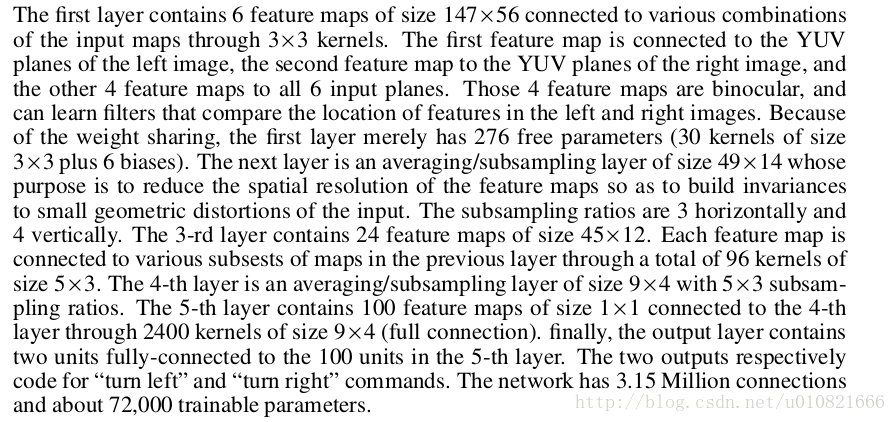
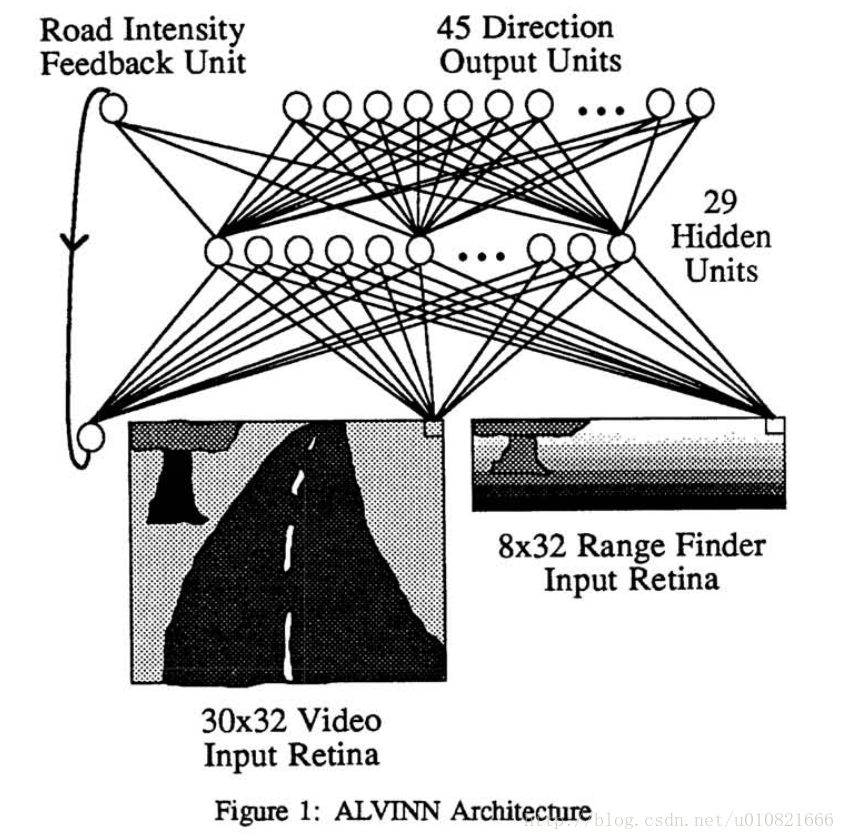
1988年,ALVINN便展示了端到端学习构建自动驾驶系统的潜力。那时,它采用了六层卷积神经网络,以双目相机的RGB图像为输入,通过端到端的有监督学习,成功将图像转换为转向角度的输出。
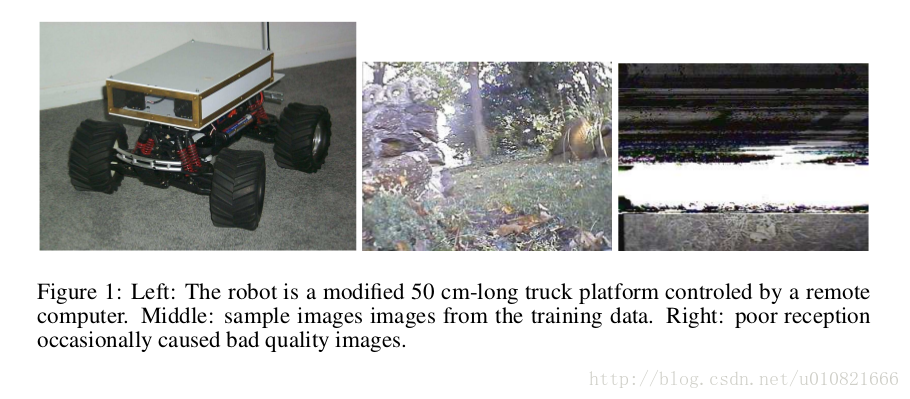
测试用的机器人长度为五十厘米,移动速度可达每秒两米,操作依靠远程的计算机。在测试过程中,我们遇到了一些困难,比如画面质量不佳的问题,但这些尝试无疑为我们的后续研究提供了新的可能性。
两种决策方法释义
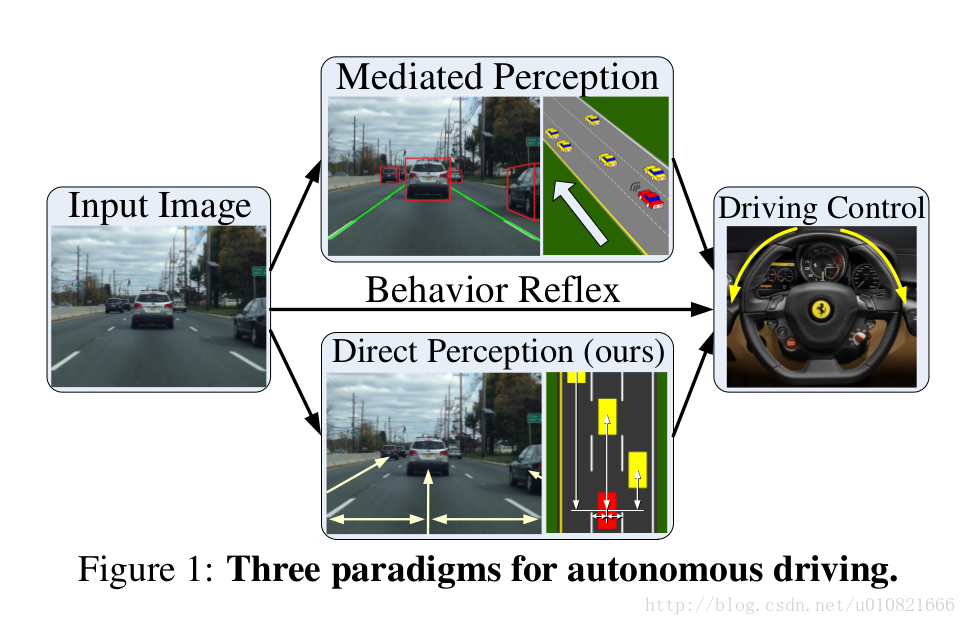
这种被称为“中介感知”的方法,可以视作一种依照规则进行的决策方式。它要求我们先对整个场景有一个全面的认识,然后才能作出判断。这就像人们在做出复杂决策之前,必须先全面掌握情况,并对各种因素进行权衡,之后才会采取行动。
行为反射是一种端到端技术,类似条件反射,它直接接收图像信息并直接产生行为。这种技术更侧重于实时性和快速反应,从而减少了在复杂场景中理解和分析所需的时间。
训练数据与泛化能力
研究主要依托TORCS(开放式赛车车模拟器)的仿真资料进行训练与检验,这款开源驾驶游戏在人工智能领域应用广泛。之所以选用此数据集,是因为其能够模拟多种驾驶场景。

为了展示该方法在真实驾驶环境中的广泛适用性,我们在KITTI数据集上进行了额外的网络训练。此外,NVIDIA指出,采用他们的技术,并不需要特别庞大的数据量,仅需100小时以下,涵盖不同路况和天气状况的数据即可满足需求。
端到端机器人导航方案
在2017年的Stanford研究论文中,作者们针对特定问题进行了探讨,并将所提出的模型运用到了以目标为导向的视觉导航领域。为了应对这一问题,他们设计了一个actor-critic(演员-评论家)模型,该模型能够依据目标函数和当前状态,使系统在泛化能力上得到提升。
就像一个有策略的决策者,根据目标和现状来灵活行动。
CMP架构的优势
CMP主要基于两点,首先,在构建地图和规划的一体化框架中,地图的构建是受规划需求驱动的。其次,CMP打造了一张从上至下的置信地图,并利用可微分的神经网络规划器,在每一个时间节点做出下一步行动的决策。
实验结果显示,CMP的性能胜过reactive strategies和standard memory-based architectures。它不仅能在新环境中表现出色,还能实现特定的语义任务,例如“前往椅子”。
大家对哪种交通出行和机器人使用的系统更看好?欢迎在评论区发表看法,同时别忘了点赞并转发这篇文章。
